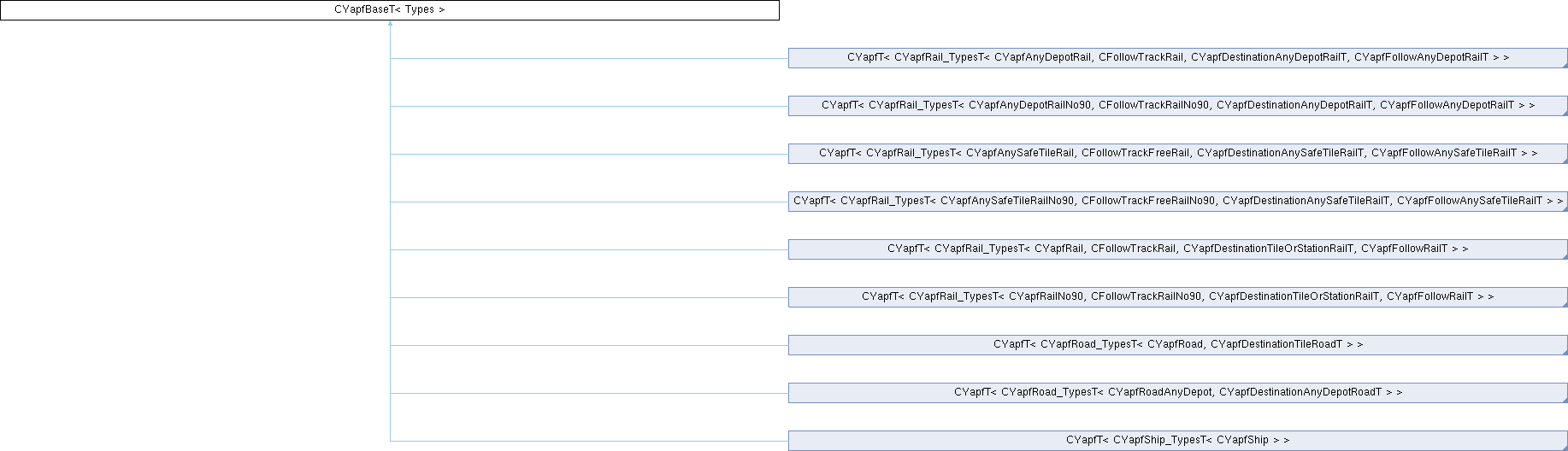
CYapfBaseT - A-star type path finder base class. More...
#include <yapf_base.hpp>
Public Types | |
| typedef Types::Tpf | Tpf |
| the pathfinder class (derived from THIS class) | |
| typedef Types::TrackFollower | TrackFollower |
| typedef Types::NodeList | NodeList |
| our node list | |
| typedef Types::VehicleType | VehicleType |
| the type of vehicle | |
| typedef NodeList::Item | Node |
| this will be our node type | |
| typedef Node::Key | Key |
| key to hash tables | |
| using | PfFollowNodeFunc = void(Node &old_node) |
| Called by YAPF to move from the given node to the next tile. | |
| using | PfCalcCostFunc = bool(Node &n, const TrackFollower *follower) |
| Called by YAPF to calculate the cost from the origin to the given node. | |
| using | PfCalcEstimateFunc = bool(Node &n) |
| Called by YAPF to calculate cost estimate. | |
| using | PfDetectDestinationFunc = bool(Node &n) |
| Called by YAPF to detect if node ends in the desired destination. | |
| using | PfDetectDestinationTileFunc = bool(TileIndex tile, Trackdir td) |
| Called by YAPF to detect if node ends in the desired destination. | |
| using | TransportTypeCharFunc = char() |
| Return debug report character to identify the transportation type. | |
Public Member Functions | |
| CYapfBaseT () | |
| default constructor | |
| ~CYapfBaseT () | |
| default destructor | |
| const YAPFSettings & | PfGetSettings () const |
| Return current settings (can be custom - company based - but later). | |
| bool | FindPath (const VehicleType *v) |
| Main pathfinder routine: | |
| Node * | GetBestNode () |
| If path was found return the best node that has reached the destination. | |
| Node & | CreateNewNode () |
| Calls NodeList::CreateNewNode() - allocates new node that can be filled and used as argument for AddStartupNode() or AddNewNode(). | |
| void | AddStartupNode (Node &n) |
| Add new node (created by CreateNewNode and filled with data) into open list. | |
| void | AddMultipleNodes (Node *parent, const TrackFollower &tf) |
| Add multiple nodes - direct children of the given node. | |
| void | AddNewNode (Node &n, const TrackFollower &follower) |
| AddNewNode() - called by Tderived::PfFollowNode() for each child node. | |
| const VehicleType * | GetVehicle () const |
| void | DumpBase (DumpTarget &dmp) const |
Data Fields | |
| NodeList | nodes |
| node list multi-container | |
| int | num_steps = 0 |
| this is there for debugging purposes (hope it doesn't hurt) | |
Protected Member Functions | |
| Tpf & | Yapf () |
| Access the inherited path finder. | |
Protected Attributes | |
| Node * | best_dest_node = nullptr |
| pointer to the destination node found at last round | |
| Node * | best_intermediate_node = nullptr |
| here should be node closest to the destination if path not found | |
| const YAPFSettings * | settings |
| current settings (_settings_game.yapf) | |
| int | max_search_nodes |
| maximum number of nodes we are allowed to visit before we give up | |
| const VehicleType * | vehicle = nullptr |
| vehicle that we are trying to drive | |
| int | stats_cost_calcs = 0 |
| stats - how many node's costs were calculated | |
| int | stats_cache_hits = 0 |
| stats - how many node's costs were reused from cache | |
Detailed Description
class CYapfBaseT< Types >
CYapfBaseT - A-star type path finder base class.
Derive your own pathfinder from it. You must provide the following template argument: Types - used as collection of local types used in pathfinder
Requirements for the Types struct:
The following types must be defined in the 'Types' argument:
- Types::Tpf - your pathfinder derived from CYapfBaseT
- Types::NodeList - open/closed node list (look at CNodeList_HashTableT) NodeList needs to have defined local type Titem - defines the pathfinder node type. Node needs to define local type Key - the node key in the collection ()
For node list you can use template class NodeList, for which you need to declare only your node type. Look at test_yapf.h for an example.
Requirements to your pathfinder class derived from CYapfBaseT:
Your pathfinder derived class needs to implement following methods: inline void PfFollowNode(Node &org) inline bool PfCalcCost(Node &n) inline bool PfCalcEstimate(Node &n) inline bool PfDetectDestination(Node &n)
For more details about those methods, look at the end of CYapfBaseT declaration. There are some examples. For another example look at test_yapf.h (part or unittest project).
Definition at line 48 of file yapf_base.hpp.
Member Typedef Documentation
◆ Key
| typedef Node::Key CYapfBaseT< Types >::Key |
key to hash tables
Definition at line 55 of file yapf_base.hpp.
◆ Node
| typedef NodeList::Item CYapfBaseT< Types >::Node |
this will be our node type
Definition at line 54 of file yapf_base.hpp.
◆ NodeList
| typedef Types::NodeList CYapfBaseT< Types >::NodeList |
our node list
Definition at line 52 of file yapf_base.hpp.
◆ PfCalcCostFunc
| using CYapfBaseT< Types >::PfCalcCostFunc = bool(Node &n, const TrackFollower *follower) |
Called by YAPF to calculate the cost from the origin to the given node.
Calculates only the cost of given node, adds it to the parent node cost and stores the result into Node::cost member.
- Parameters
-
n The node to consider. follower The track follower to the next node.
- Returns
trueiff the costs could be calculated.
Definition at line 75 of file yapf_base.hpp.
◆ PfCalcEstimateFunc
| using CYapfBaseT< Types >::PfCalcEstimateFunc = bool(Node &n) |
Called by YAPF to calculate cost estimate.
Calculates distance to the destination adds it to the actual cost from origin and stores the sum to the Node::estimate.
- Parameters
-
n The node to start from.
- Returns
trueiff the cost could be estimated.
Definition at line 83 of file yapf_base.hpp.
◆ PfDetectDestinationFunc
| using CYapfBaseT< Types >::PfDetectDestinationFunc = bool(Node &n) |
Called by YAPF to detect if node ends in the desired destination.
- Parameters
-
n The current node.
- Returns
trueiff the destination has been reached.
Definition at line 90 of file yapf_base.hpp.
◆ PfDetectDestinationTileFunc
| using CYapfBaseT< Types >::PfDetectDestinationTileFunc = bool(TileIndex tile, Trackdir td) |
Called by YAPF to detect if node ends in the desired destination.
- Parameters
-
tile The reached tile. td The reached track direction.
- Returns
trueiff the destination has been reached.
Definition at line 98 of file yapf_base.hpp.
◆ PfFollowNodeFunc
| using CYapfBaseT< Types >::PfFollowNodeFunc = void(Node &old_node) |
Called by YAPF to move from the given node to the next tile.
For each reachable trackdir on the new tile creates new node, initializes it and adds it to the open list by calling Yapf().AddNewNode(n).
- Parameters
-
old_node The node to follow from.
Definition at line 65 of file yapf_base.hpp.
◆ Tpf
| typedef Types::Tpf CYapfBaseT< Types >::Tpf |
the pathfinder class (derived from THIS class)
Definition at line 50 of file yapf_base.hpp.
◆ TrackFollower
| typedef Types::TrackFollower CYapfBaseT< Types >::TrackFollower |
Definition at line 51 of file yapf_base.hpp.
◆ TransportTypeCharFunc
| using CYapfBaseT< Types >::TransportTypeCharFunc = char() |
Return debug report character to identify the transportation type.
- Returns
- The debug representation
Definition at line 104 of file yapf_base.hpp.
◆ VehicleType
| typedef Types::VehicleType CYapfBaseT< Types >::VehicleType |
the type of vehicle
Definition at line 53 of file yapf_base.hpp.
Constructor & Destructor Documentation
◆ CYapfBaseT()
|
inline |
default constructor
Definition at line 121 of file yapf_base.hpp.
References _settings_game, max_search_nodes, PfGetSettings(), and settings.
◆ ~CYapfBaseT()
|
inline |
default destructor
Definition at line 124 of file yapf_base.hpp.
Member Function Documentation
◆ AddMultipleNodes()
|
inline |
Add multiple nodes - direct children of the given node.
- Parameters
-
parent The parent of the nodes. tf The track follower to keep following.
Definition at line 236 of file yapf_base.hpp.
References Yapf().
◆ AddNewNode()
|
inline |
AddNewNode() - called by Tderived::PfFollowNode() for each child node.
Nodes are evaluated here and added into open list
- Parameters
-
n The node to add. follower The track follower to keep calculate the cost with.
Definition at line 252 of file yapf_base.hpp.
References NodeList< Titem, Thash_bits_open, Thash_bits_closed >::FindClosedNode(), NodeList< Titem, Thash_bits_open, Thash_bits_closed >::FindOpenNode(), NodeList< Titem, Thash_bits_open, Thash_bits_closed >::InsertOpenNode(), NodeList< Titem, Thash_bits_open, Thash_bits_closed >::PopOpenNode(), and Yapf().
Referenced by YapfRiverBuilder::PfFollowNode(), and YapfShipRegions::PfFollowNode().
◆ AddStartupNode()
|
inline |
Add new node (created by CreateNewNode and filled with data) into open list.
- Parameters
-
n The node to add.
Definition at line 219 of file yapf_base.hpp.
References NodeList< Titem, Thash_bits_open, Thash_bits_closed >::FindOpenNode(), NodeList< Titem, Thash_bits_open, Thash_bits_closed >::InsertOpenNode(), and Yapf().
◆ CreateNewNode()
|
inline |
Calls NodeList::CreateNewNode() - allocates new node that can be filled and used as argument for AddStartupNode() or AddNewNode().
- Returns
- The created node.
Definition at line 209 of file yapf_base.hpp.
References NodeList< Titem, Thash_bits_open, Thash_bits_closed >::CreateNewNode().
Referenced by YapfRiverBuilder::PfFollowNode(), and YapfShipRegions::PfFollowNode().
◆ DumpBase()
|
inline |
Definition at line 320 of file yapf_base.hpp.
◆ FindPath()
|
inline |
Main pathfinder routine:
- set startup node(s)
- main loop that stops if:
- the destination was found
- or the open list is empty (no route to destination).
- or the maximum amount of loops reached - max_search_nodes (default = 10000)
- Parameters
-
v The vehicle to find the path for.
- Returns
- true if the path was found
Definition at line 156 of file yapf_base.hpp.
References NodeList< Titem, Thash_bits_open, Thash_bits_closed >::ClosedCount(), Debug, NodeList< Titem, Thash_bits_open, Thash_bits_closed >::GetBestOpenNode(), NodeList< Titem, Thash_bits_open, Thash_bits_closed >::InsertClosedNode(), NodeList< Titem, Thash_bits_open, Thash_bits_closed >::OpenCount(), NodeList< Titem, Thash_bits_open, Thash_bits_closed >::PopOpenNode(), and Yapf().
Referenced by YapfShipRegions::FindWaterRegionPath().
◆ GetBestNode()
|
inline |
If path was found return the best node that has reached the destination.
Otherwise return the best visited node (which was nearest to the destination).
- Returns
- The best node, or best intermediate node.
Definition at line 199 of file yapf_base.hpp.
Referenced by YapfShipRegions::FindWaterRegionPath().
◆ GetVehicle()
|
inline |
Definition at line 315 of file yapf_base.hpp.
◆ PfGetSettings()
|
inline |
Return current settings (can be custom - company based - but later).
- Returns
- The pathfinder settings.
Definition at line 141 of file yapf_base.hpp.
Referenced by CYapfBaseT().
◆ Yapf()
|
inlineprotected |
Access the inherited path finder.
- Returns
- The current path finder.
Definition at line 131 of file yapf_base.hpp.
Referenced by AddMultipleNodes(), AddNewNode(), AddStartupNode(), and FindPath().
Field Documentation
◆ best_dest_node
|
protected |
pointer to the destination node found at last round
Definition at line 107 of file yapf_base.hpp.
◆ best_intermediate_node
|
protected |
here should be node closest to the destination if path not found
Definition at line 108 of file yapf_base.hpp.
◆ max_search_nodes
|
protected |
maximum number of nodes we are allowed to visit before we give up
Definition at line 110 of file yapf_base.hpp.
Referenced by CYapfBaseT().
◆ nodes
| NodeList CYapfBaseT< Types >::nodes |
node list multi-container
Definition at line 57 of file yapf_base.hpp.
◆ num_steps
| int CYapfBaseT< Types >::num_steps = 0 |
this is there for debugging purposes (hope it doesn't hurt)
Definition at line 117 of file yapf_base.hpp.
◆ settings
|
protected |
current settings (_settings_game.yapf)
Definition at line 109 of file yapf_base.hpp.
Referenced by CYapfBaseT().
◆ stats_cache_hits
|
protected |
stats - how many node's costs were reused from cache
Definition at line 114 of file yapf_base.hpp.
◆ stats_cost_calcs
|
protected |
stats - how many node's costs were calculated
Definition at line 113 of file yapf_base.hpp.
◆ vehicle
|
protected |
vehicle that we are trying to drive
Definition at line 111 of file yapf_base.hpp.
The documentation for this class was generated from the following file:
- src/pathfinder/yapf/yapf_base.hpp